

Mech-Viz Robot Programming Software
Mech-Vision is an industry-leading machine vision software. It is designed to quickly build vision applications, whether simple or complex. With Mech-Vision, users can manage a wide range of automation tasks, including bin picking, machine tending, piece picking, depalletizing and palletizing, assembly, and more.

Ease of use

Powerful functionality

Multiple languages
Easy to use
Unified programming mode
Users don't need to learn or switch between programming languages for different robot brands, simplifying the user experience.
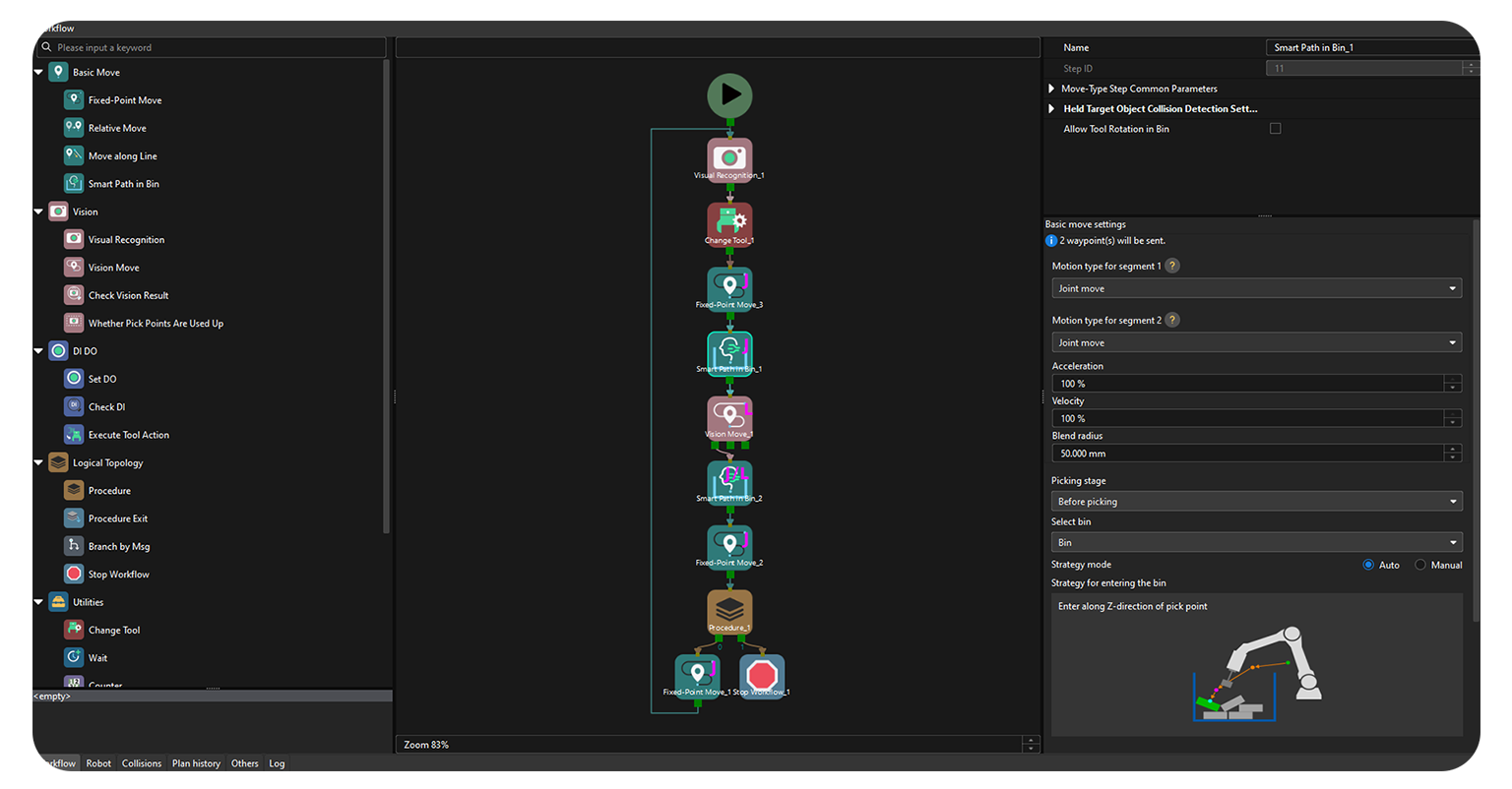
Code-free programming
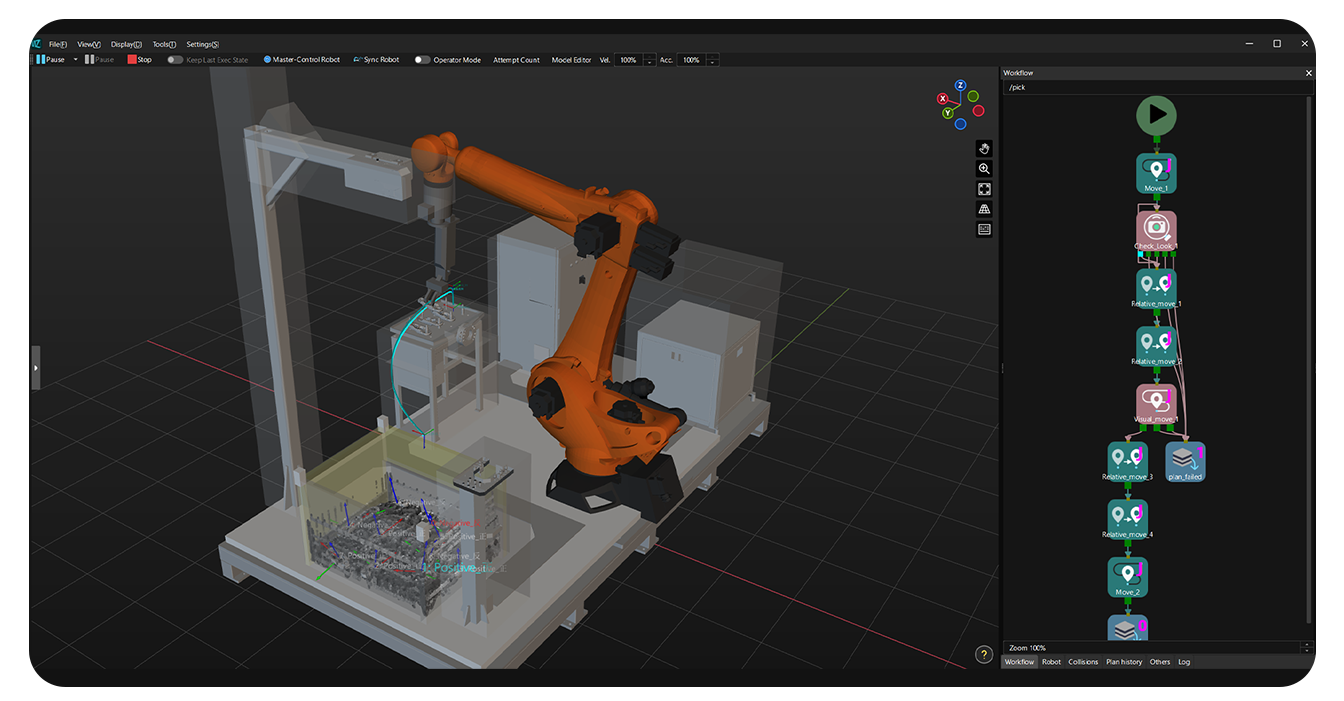
A construction form of flow chart is adopted for programming in Mech-Viz software, therefore code programming experience is not required for users, and robot routines can be realized only by 'adding function module - configuring module parameters - connecting module wires'.
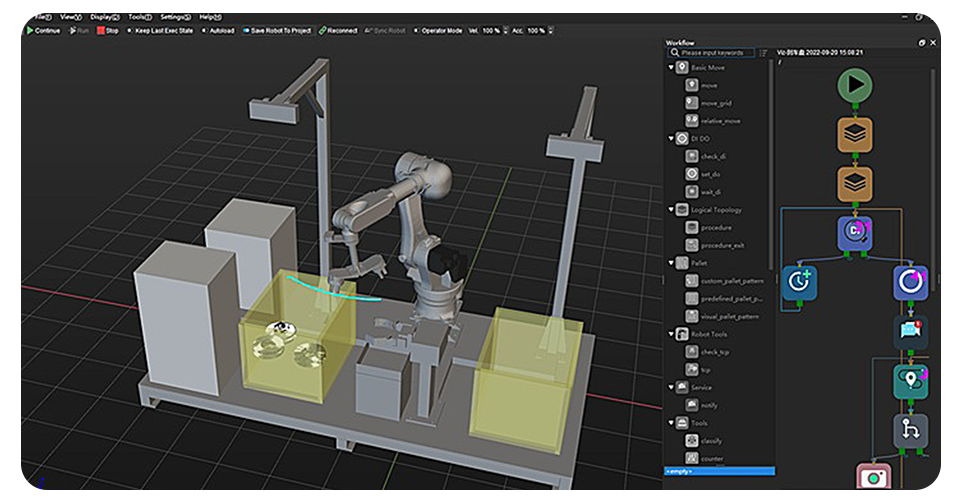
One-button 3D simulation
The software supports one-button motion simulation, and displays the motion trajectory of robot in the form of animation.
Powerful functions

Extensive robot adaptation
The software has been adapted to robots of most leading brands at home and abroad, and complete motion control of adapted robots can be realized.
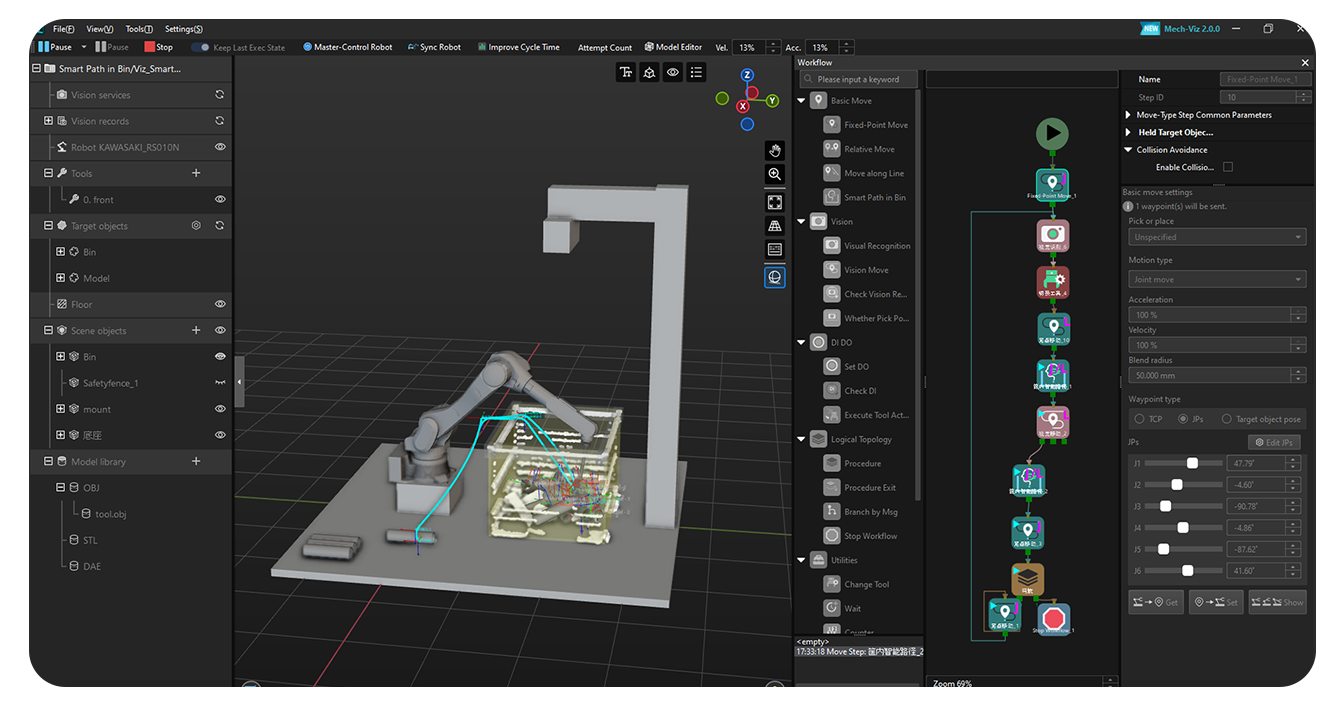
Motion planning
Motion planning works with a variety of built-in collision detection algorithms to make an early prediction of possible collisions in robot motion.
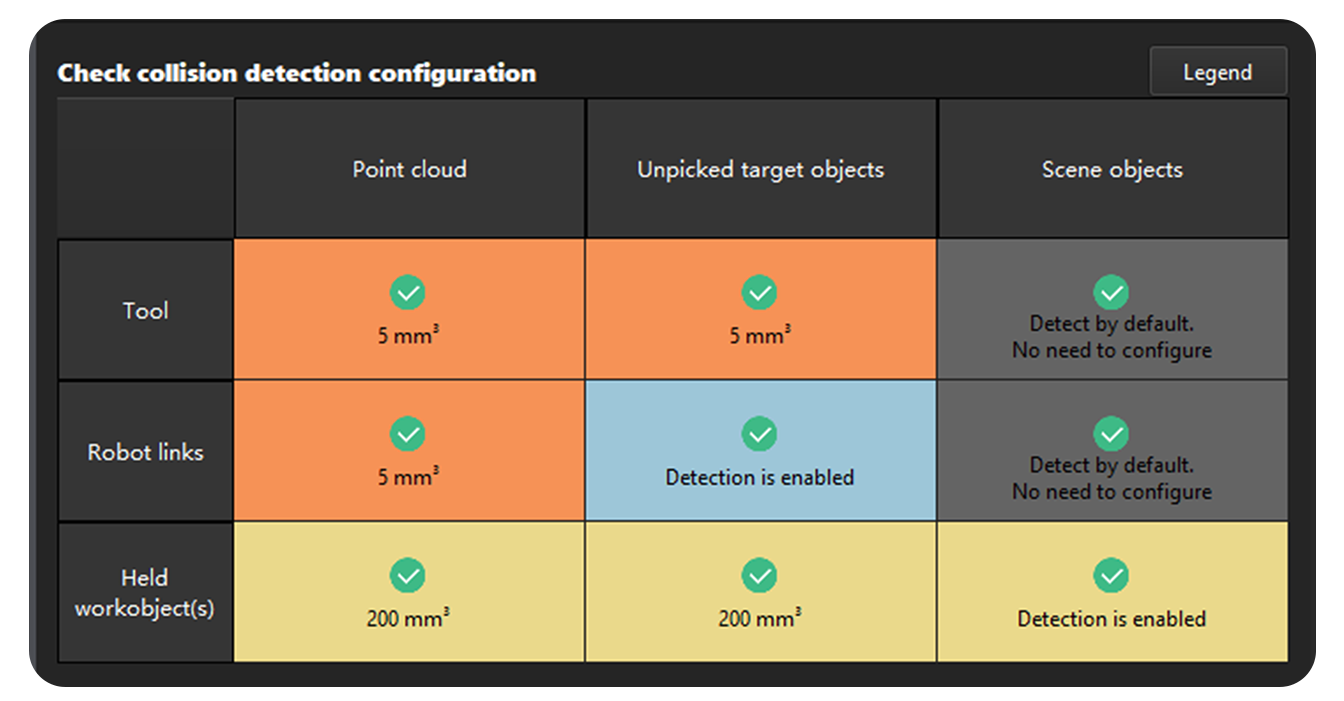
Collision detection
Mech-Viz offers an intuitive interface for easy parameter adjustments, enabling quick collision detection setup to minimize robot collisions with its surroundings.
Picking strategy
The software supports multi-picking points, picking margin and symmetry settings, multiple TCPs. It can work with motion planning and collision detection, guiding the robot to pick objects accurately and avoid collision.