
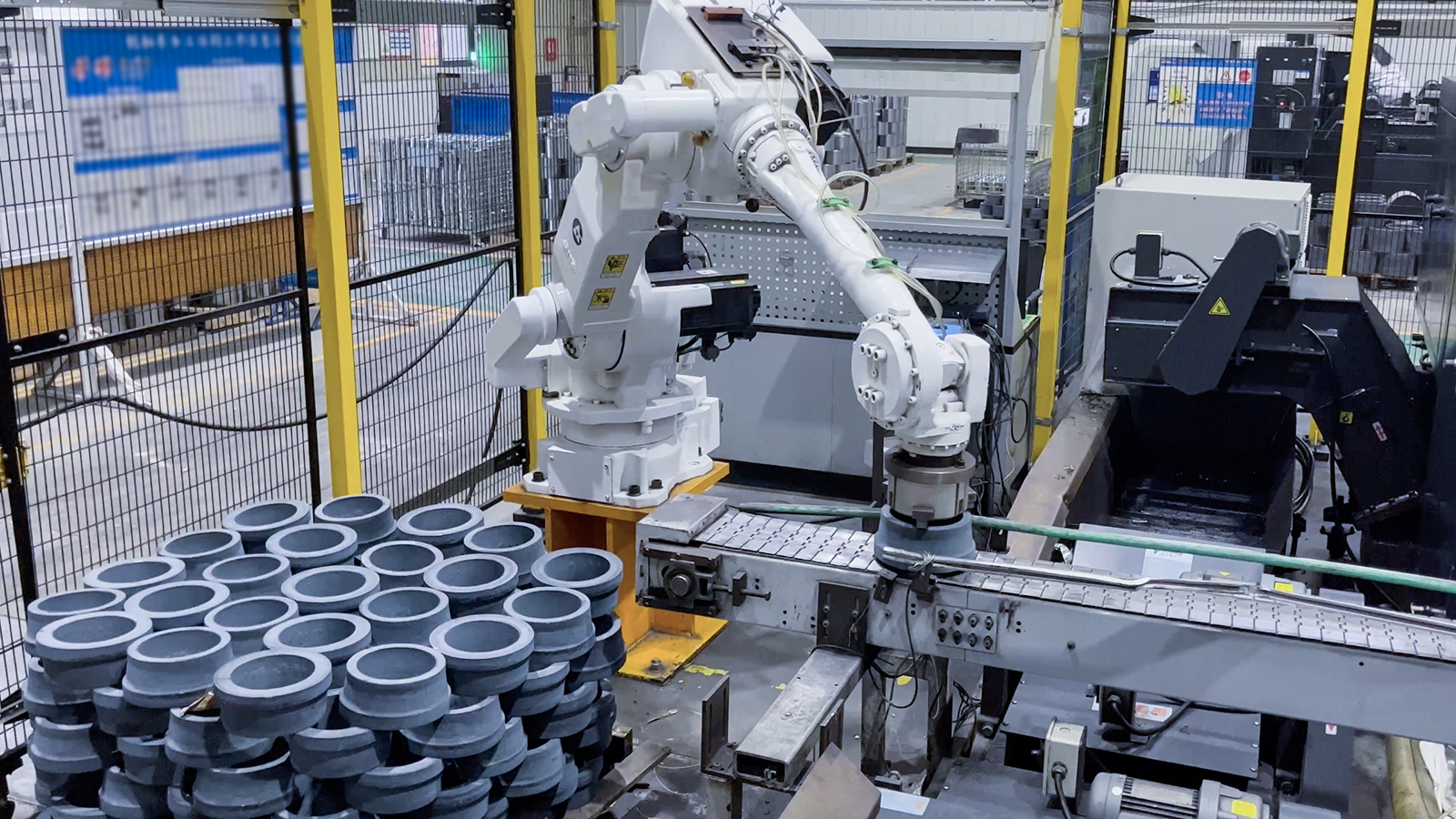
Bin Picking
Guided by Mech-Mind 3D vision system, robots can recognize randomly-piled materials, even those with dark or reflective surfaces and complex structures, and then pick them up from deep bins accurately without damaging the components.
Core Advantages
Robust 3D Vision System
Mech-Eye industrial 3D camera generates high-resolution and accurate 3D point clouds of various challenging objects, including reflective, machined metal parts, complex-structured and irregular objects, etc.
Powerful AI Algorithms
Advanced AI algorithms, such as picking strategy, enable robots to accurately pick up various objects. Collision detection and path planning algorithms ensure precise and collision-free robotic picking.

Plug and Play, Easy to Use
With a visualized interface, Mech-Viz robot programming software can simulate the robot's path with only one click. The code-free programming environment provides a low threshold for users to deploy robotic applications quickly.
Seamless Integration with the WMS System
Seamless integration with the WMS system allows robots to pick objects on demand.
Specification
| Objects | Support objects in different sizes and shapes (including randomly stacked tiny objects, complex-structured metal parts with dark or shiny surfaces, etc.) |
|---|---|
| Robot Brands | Support almost all major-brand robots |
| Calibration | Self-calibration |
Intelligent Algorithms
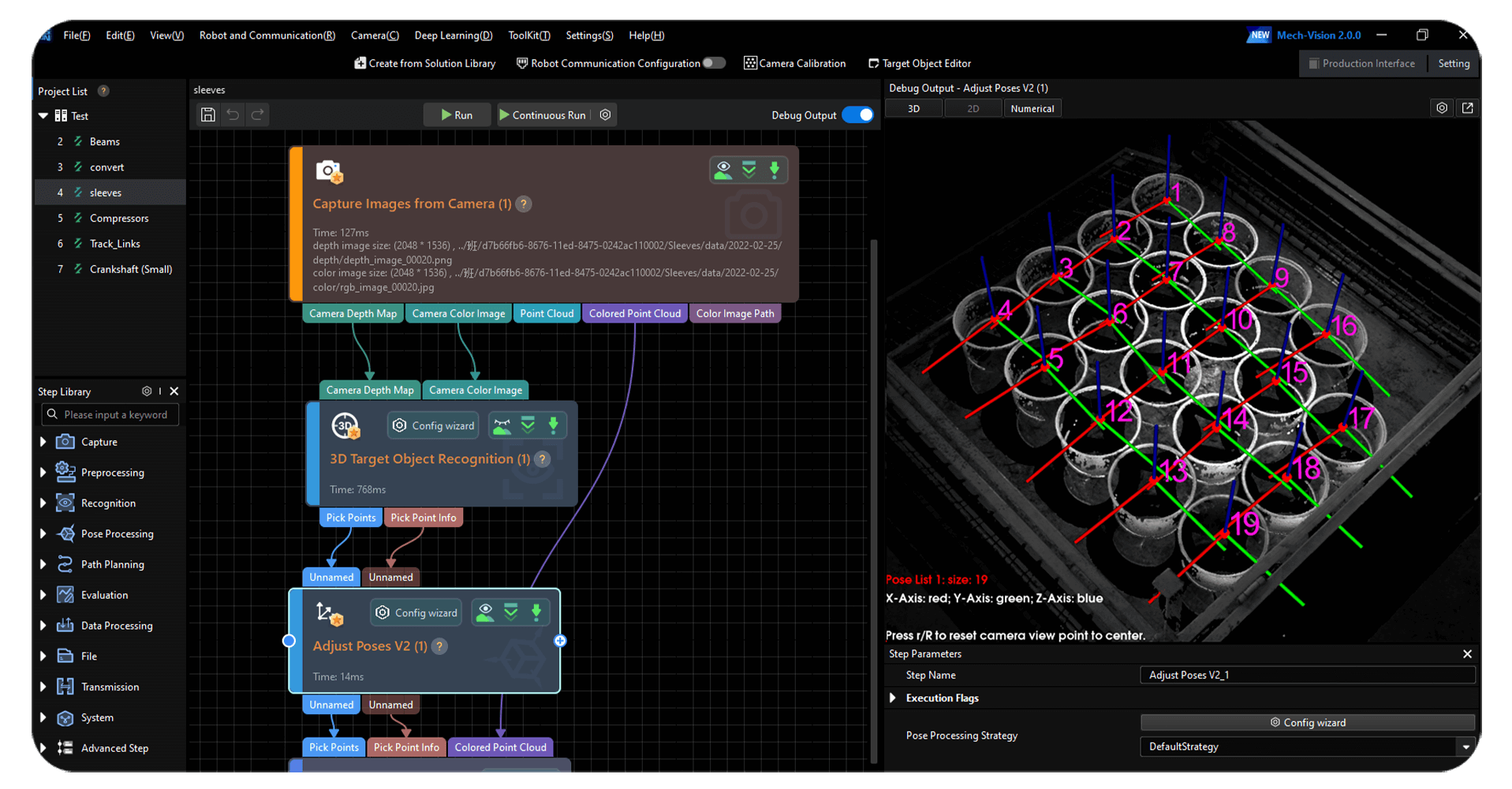
Mech-Vision Interface
- Machine vision software Mech-Vision simplifies all codes into steps, and users can edit algorithms without writing any codes.
- It can support users to develop customized algorithms and independently deploy multiple typical applications, including bin picking, machine tending, piece picking, depalletizing, and palletizing, etc.
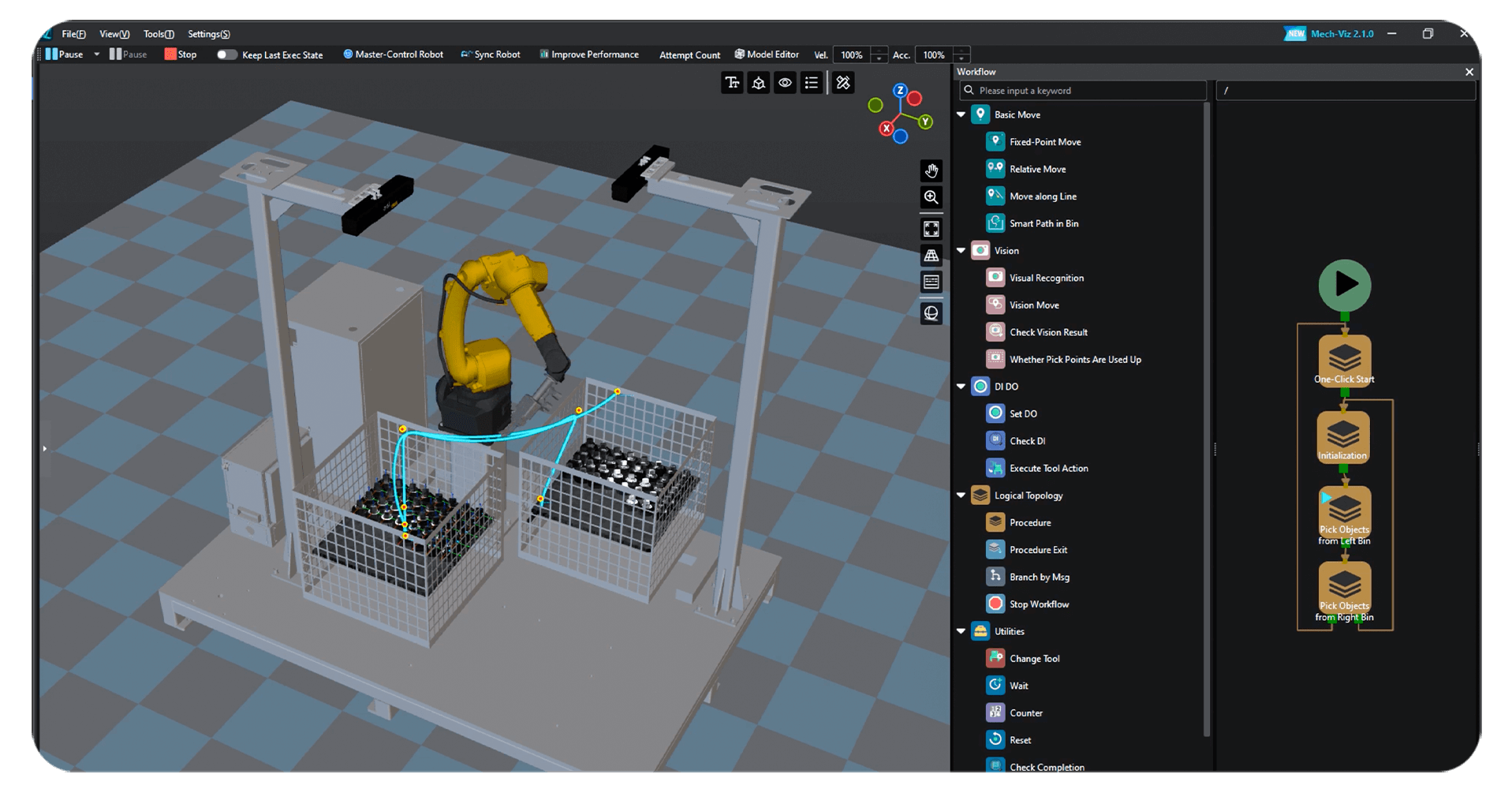
Mech-Viz Interface
- One-click simulation on the left side of the software. Users can intuitively see the robot's path.
- The right side is the robot operation process, which is easy to learn to operate.
- Different from the traditional code-based programming software, Mech-Viz is a graphical robot programming software.
- Built-in path planning, collision detection, picking strategy, and other intelligent AI algorithms guarantee accurate robotic picking without collisions.
- With Mech-Viz, non-experts can deploy various robotic applications after simple training.
- Mech-Viz supports almost all major-brand robots.
Mech-Eye Industrial 3D Cameras


Mech-Eye PRO M-GL Industrial 3D Camera
- High accuracy
- Extended FOV
- Detail-rich 3D point clouds
- Rapid image acquisition
- Designed for medium-range robotic applications
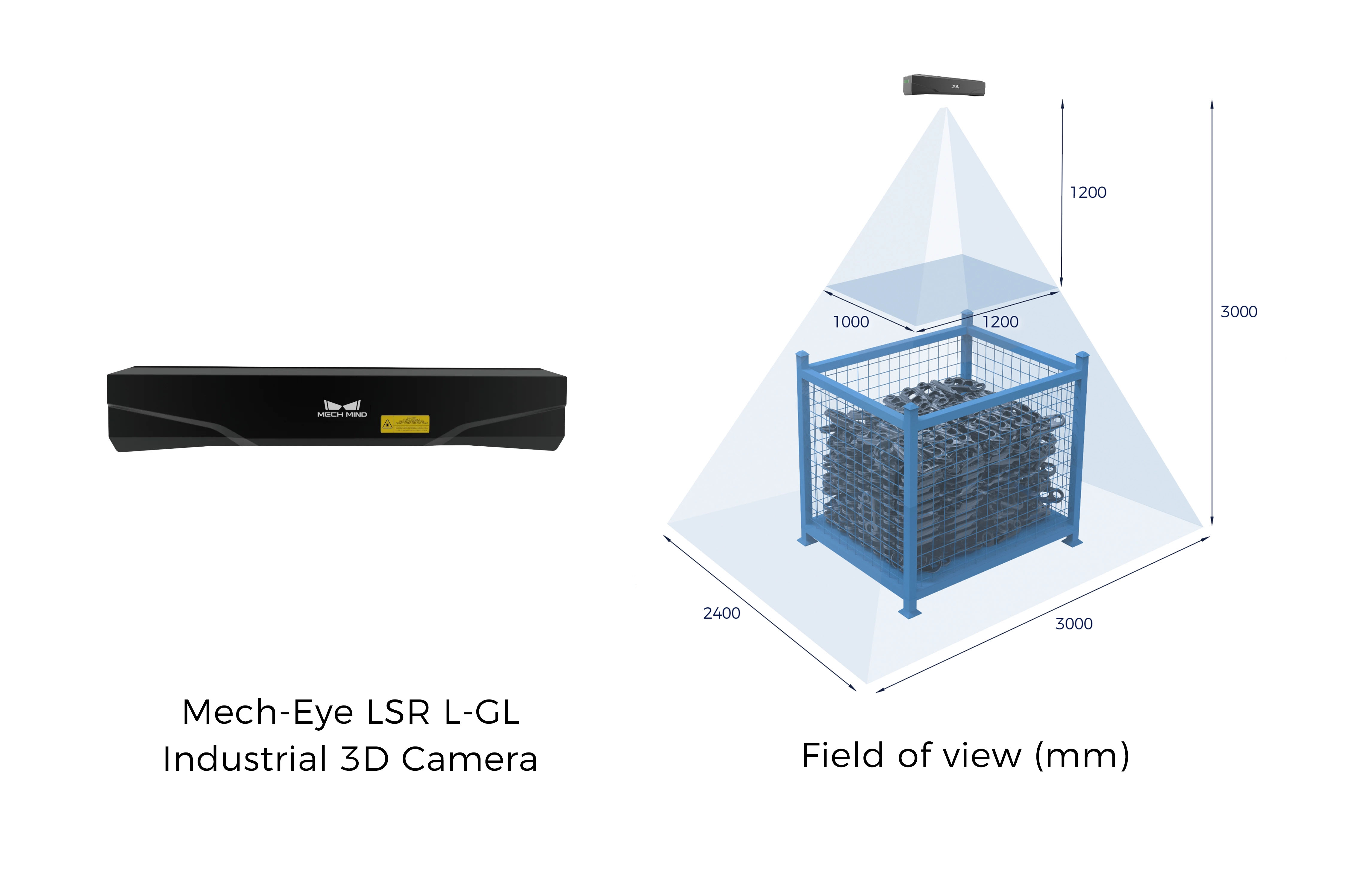
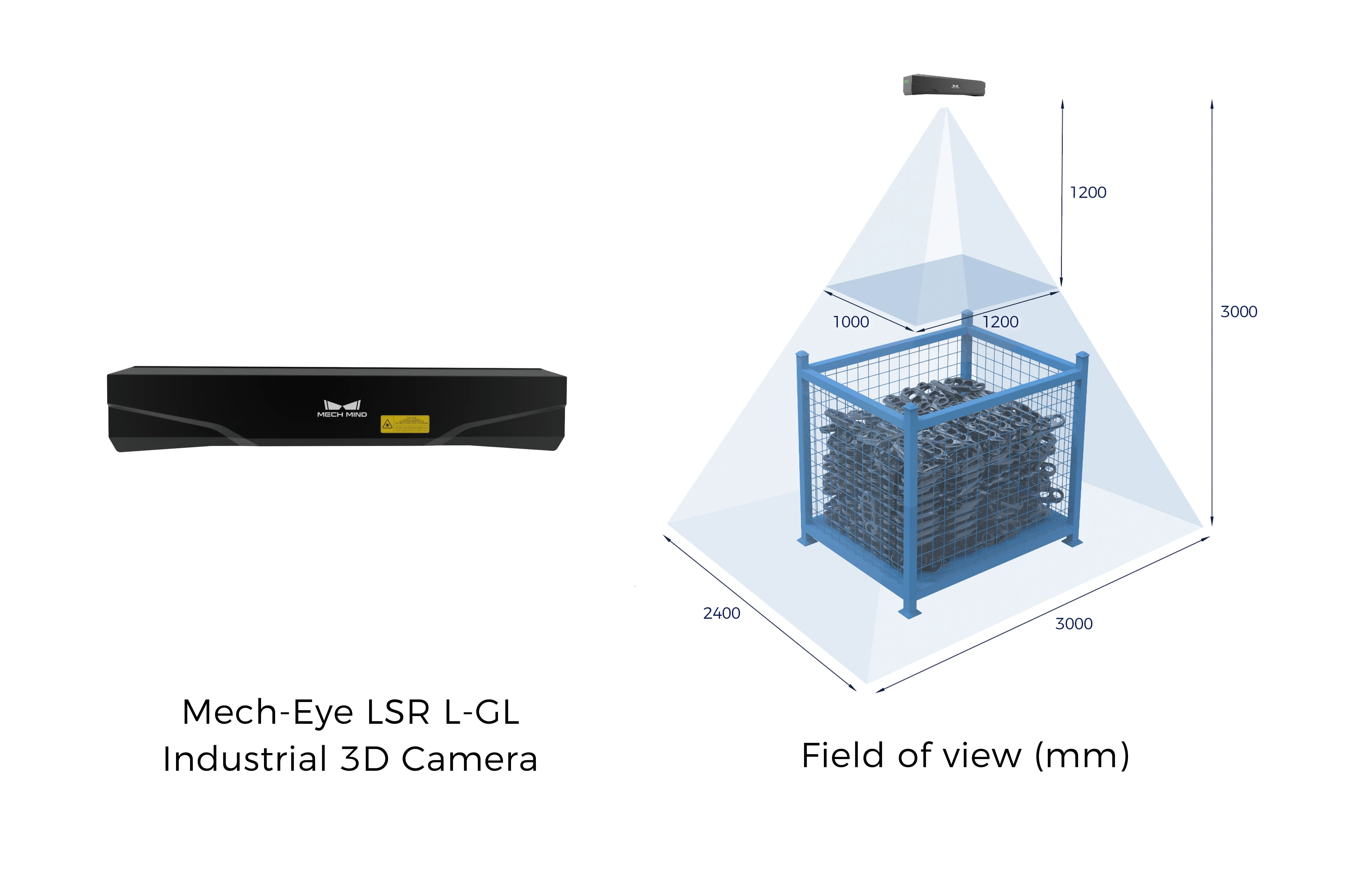
Mech-Eye LSR L-GL Industrial 3D Camera
- Large FOV
- Ambient light resistance
- Robust interreflection suppression
- Ideal for robotic guidance
Highly Accurate 3D Point Clouds
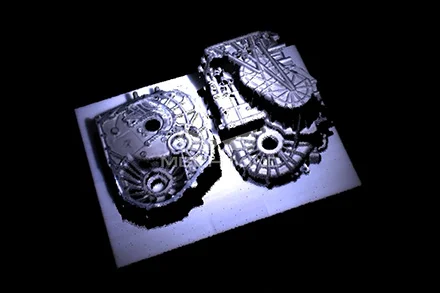
Gearbox housings
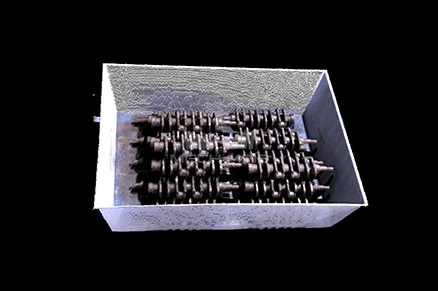
Crankshafts

Dark objects
Cases



Videos

Popular FAQs for Bin Picking
Q1: What is bin picking?
Bin picking is the name of the technique that is being used by a robot to grab objects that are randomly placed inside a bin/box. Bin picking is common to see in loading/unloading objects scenarios.
Q2: How does an industrial 3D camera ease the bin picking process?
Picking parts, raw materials, or SKUs from a deep bin requires robots to work with high accuracy, stability, and flexibility. While accuracy is one of the core enablers of stable picking, it's also where industrial 3D cameras come to help. To be precise, industrial 3D cameras are the 'eyes' of robots. Robots equipped with the industrial 3D camera are able to capture and collect 3D data of target objects (x, y, and z-axis of objects). These 3D data will be processed into depth information (position, orientation, and location) to guide robots to pick objects accurately, quickly, and stably.
Q3: What are the typical applications for bin picking?
Machine tending (loading), palletizing (mixed palletizing) & depalletizing, assembly, automated piece picking, etc., are all the typical applications for bin picking. Industrial operations involving picking objects from a box/a bin (during processing, production, delivery, etc.) are all the applications of bin picking.